2024年8月20日
本文主要介绍了 coScene 时空数据平台的远程可视化功能。该功能通过帮助运维人员实时远程操作设备(例如,远程下发命令、SSH 连接、实时可视化等),帮助自主移动机器人公司实现远程运维,降低运维成本。
背景
在人口老龄化的趋势下,结合年轻人不愿意从事清洁工作的基本面,商用清洁机器人应运而生。不同于白家电的是,商业清洁机器人的故障率远远高于白家电。
故障问题频发,是困扰商业清洁机器人发展的核心矛盾。商清机器人故障一般可以分为两类:一类是硬件故障,需返厂维修;另外一类是软件故障或使用故障,这一类可能会需要运维人员上门维修。
如何降低故障率,提升机器人的平均服务时长,是商业清洁机器人的生死局。尽管市场需求旺盛,但自主移动机器人出货量不高。问题的核心在于高昂的运维成本导致的过高的供给成本。卖一台亏一台,而且是持续亏钱,所以很多公司不能持续供给客户。
要想解决这一问题,就需要通过构建数据闭环的远程运维平台,让不同的团队都能参与其中,从而妥善解决机器人的远程运维痛点。

为此,coScene 提出了自己的解决之道。通过我们的时空数据平台,你可以实现:
实时可视化:直接通过网页看到设备的实时状态信息,实现远程调控;
网页 SSH 连接:网页端直接连接设备终端,执行命令行操作,可对软件进行热补丁、上传或下载文件等操作;
远程下发命令:远程向设备下发命令,让设备执行特定的任务;
端口号映射:让没有公网 IP 的设备,在确保数据安全的前提下暂时“暴露”在互联网上。通过“端口号映射”的功能,让设备可被安全和加密地访问。
下面,让我们一起了解如何使用我们的时空数据平台来实现机器人的远程可视化运维。
前提条件
你的组织已联系 coScene 开通「远程控制模块」
你的物理设备端已安装 coBridge 节点
下载源码:https://github.com/coscene-io/coBridge
你的物理设备端已安装 coScene 的设备端程序
进入「组织管理」-「设备」页面

点击【添加设备】按钮,复制安装命令
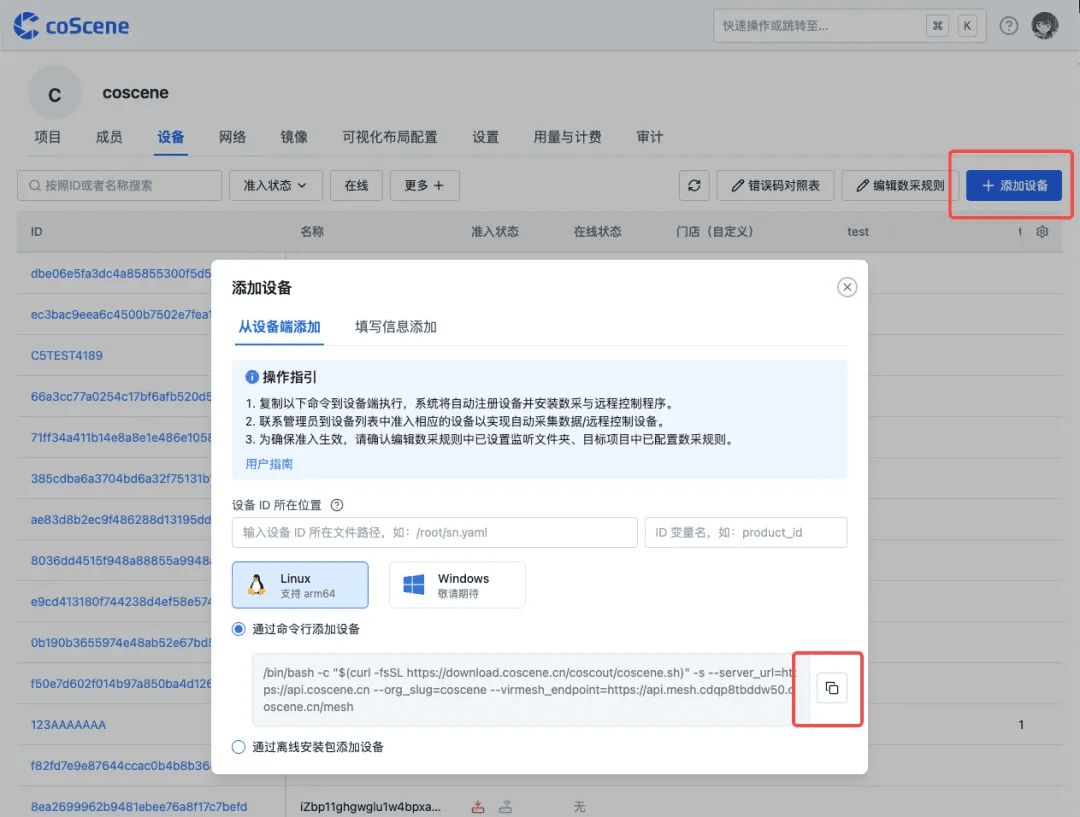
在物理设备终端执行安装命令
组织管理员已准入设备,允许在平台上对该物理设备进行远程控制
远程可视化运维
实时可视化
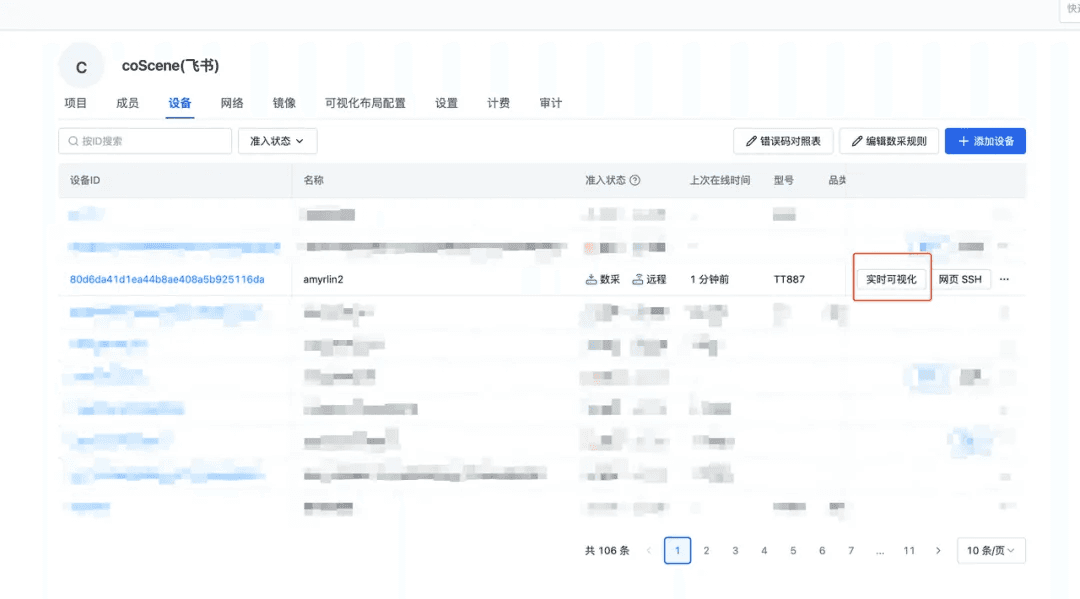
coBridge 节点启动后,可通过「实时可视化」功能在网页端实现订阅设备 Topic、下发 Service 等操作,实现对设备的远程实时可视化。
当设备准入后,在「组织管理」里「设备」页面列表中点击【实时可视化】按钮,即可查看设备的实时情况。

网页 SSH 接口
当设备准入后,在「组织管理」里「设备」页面列表查看设备,设备会出现【网页 SSH】的按钮,点击之后即可通过 SSH 连接到设备。
连接到设备后,可执行命令上传下载文件:
上传文件:
trz file1,将本地的file1文件上传到设备端下载文件:
tsz file2,将设备端的file2文件下载到本机


远程下发命令
当设备实时在线时,可通过【远程 CMD】对设备下发命令,执行特定的任务。

以创建文件、查看目录下的文件为例:
点击【远程 CMD】按钮,进入操作页面。执行
touch ~/hello-world.txt命令,创建一个名为hello-world.txt的文件。

再执行
ls ~/命令获取当前目录下的所有文件信息,可以看到目录下新增了一个名为hello-world.txt的文件

端口号映射
当设备没有公网 IP 时,用户无法直接访问设备获取相关信息,而「端口号映射」功能可以帮助解决这个问题。这个功能能够将设备上的端口转发出去,让用户可以在公网(互联网)上访问这些端口。比如,用户可以暂时将设备上的服务暴露出来,方便进行本地连接调试等操作。

以通过映射的地址访问设备端~目录下的文件为例:
通过「端口号」,输入
9000,配置 9000 端口映射

通过「网页 SSH」,在设备端执行
python3 -m http.server 9000 -d ~命令,启动简易HTTP Server

在浏览器中请求相关地址(9000 端口映射出的地址),查看设备端
~目录下的所有文件信息

在设备端,可看到浏览器的请求,并且返回了
200,表示请求成功。
coScene 时空数据平台,让远程可视化运维触手可及!