2025年5月13日
在泛机器人研发过程中,针对算法和软件的反复测试与验证是日常工作中最耗时、最容易出错的一环。
你是不是也经历过这样的日常?
算法改了一行代码,结果测了一整天
本地仿真环境稳定性无法保障,当仿真环节遇到问题时,难以短时间解决
多人协作,各测各的,结果对不上
尤其对于移动机器人、自动驾驶和具身智能等领域的研发人员来说,软件更新频繁、仿真环境搭建复杂、测试标准不一、本地测试排队等这些问题让本地测试效率低下、协作困难。
我们一直在思考:有没有一种方法,只要编译好算法,不需要任何 ROS 环境或其他消息中间件的环境依赖,就能自动验证,还能把测试结果输出?
基于 ScenenOps 理念,刻行时空打造了一站式的时空多模态数据管理平台,可满足这样的需求。
通过构建大规模场景数据集和仿真与测试的运行时环境,极大地简化了算法人员执行仿真和测试运行工作。
任何刻行时空平台的用户,在已经构建大规模场景数据集的基础上,算法人员只需上传待测程序,结合场景数据集,自动运行测试、生成测试报告。整个流程全在线、无依赖!

🧱 步骤 1:构建属于你自己的算法与软件测试底座
我们知道,每支团队的技术栈都不一样。因此我们支持用户基于自己的系统依赖,构建专属镜像并上传。
你可以使用如下 Dockerfile 模板来构建环境:
也可参考我们的开源示例项目:
构建完成后,打包推送至平台镜像仓库,全公司的研发同事都可以复用这个稳定的测试环境,无需本地反复搭建环境。
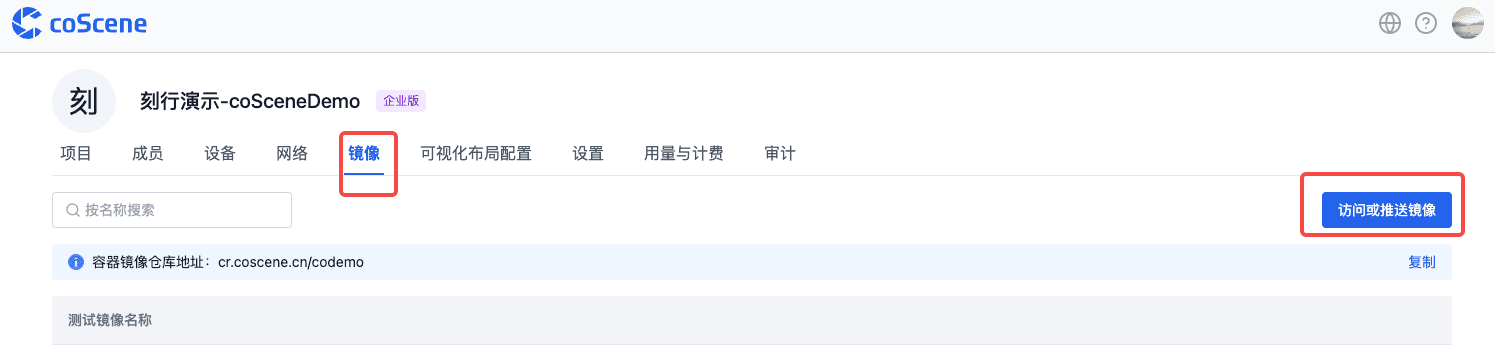
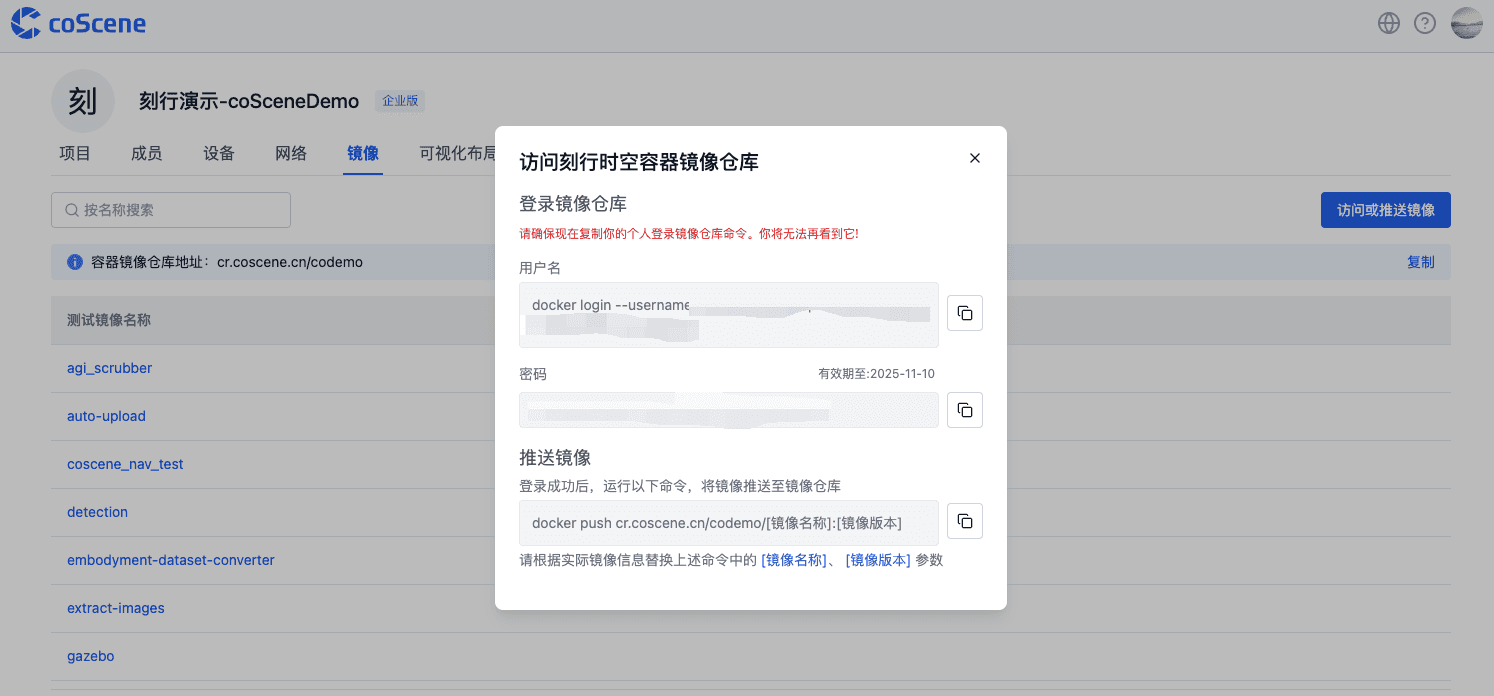
登录刻行时空平台,进入组织管理获取您的专属镜像仓库地址与信息,并登录 docker:
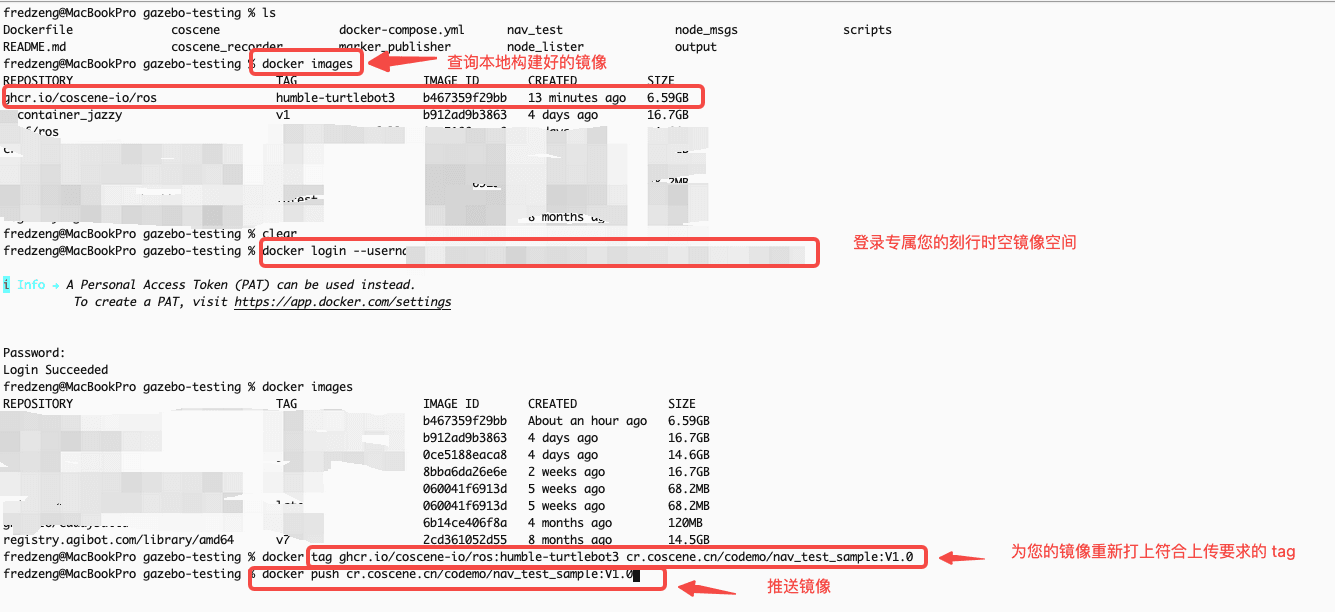
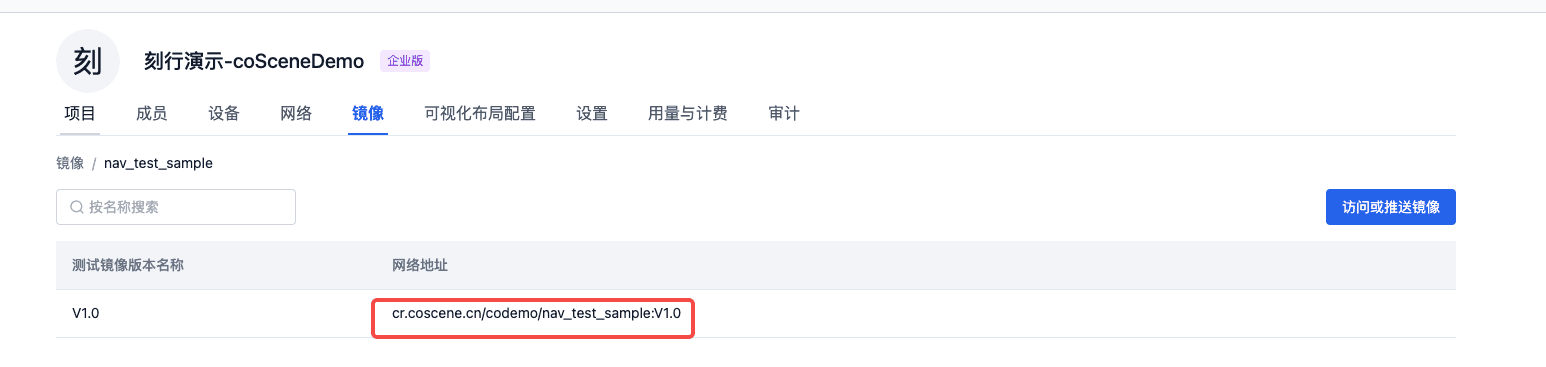
推送完成后,可登录平台查看您的镜像并获取链接:
📦 步骤 2:上传你的算法与测试程序
你的算法代码编译完成后,只需压缩成 zip/tar 包,通过平台上传。

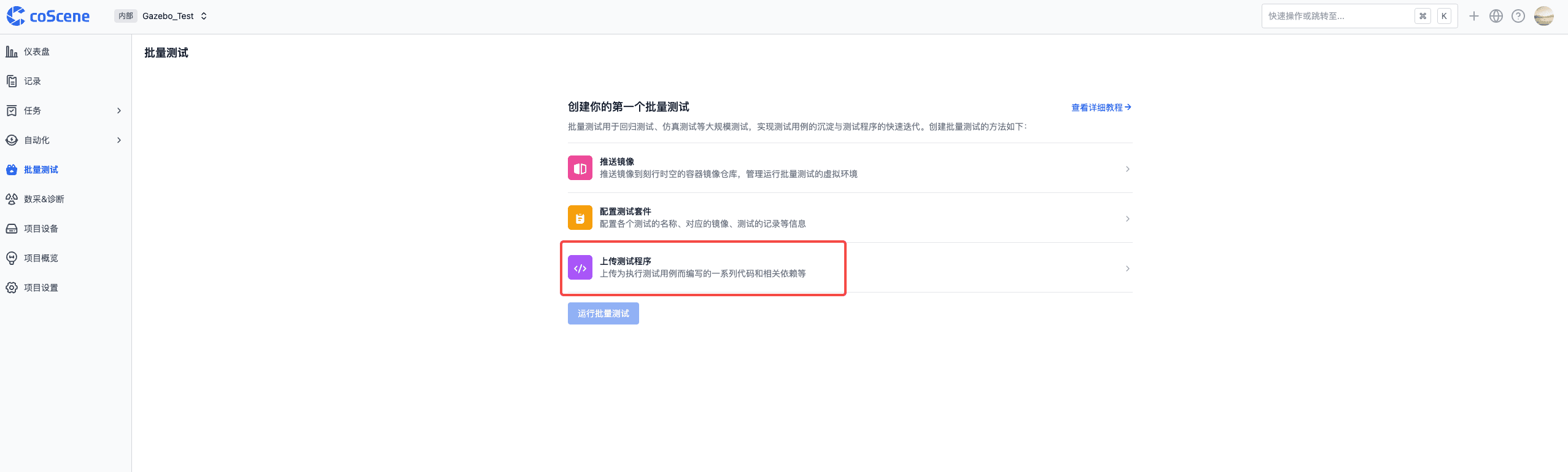

上传的程序将在平台自动解压,并在你设置的容器中运行,兼容源码或编译后的可执行文件。
可参考我们的支持文档: coScene 帮助文档 | 测试程序
🌐 企业用户还能接入 GitLab / GitHub,一键上传构建结果,跳过本地打包流程,直接进入测试。
🧪 步骤 3:准备你的测试用例
平台支持通过“组织 → 项目 → 记录”的形式,配置多条测试用例。每条测试记录都像是你预设的“虚拟测试现场”,环境可以任意组合,配置灵活复用,极大节省测试搭建时间。
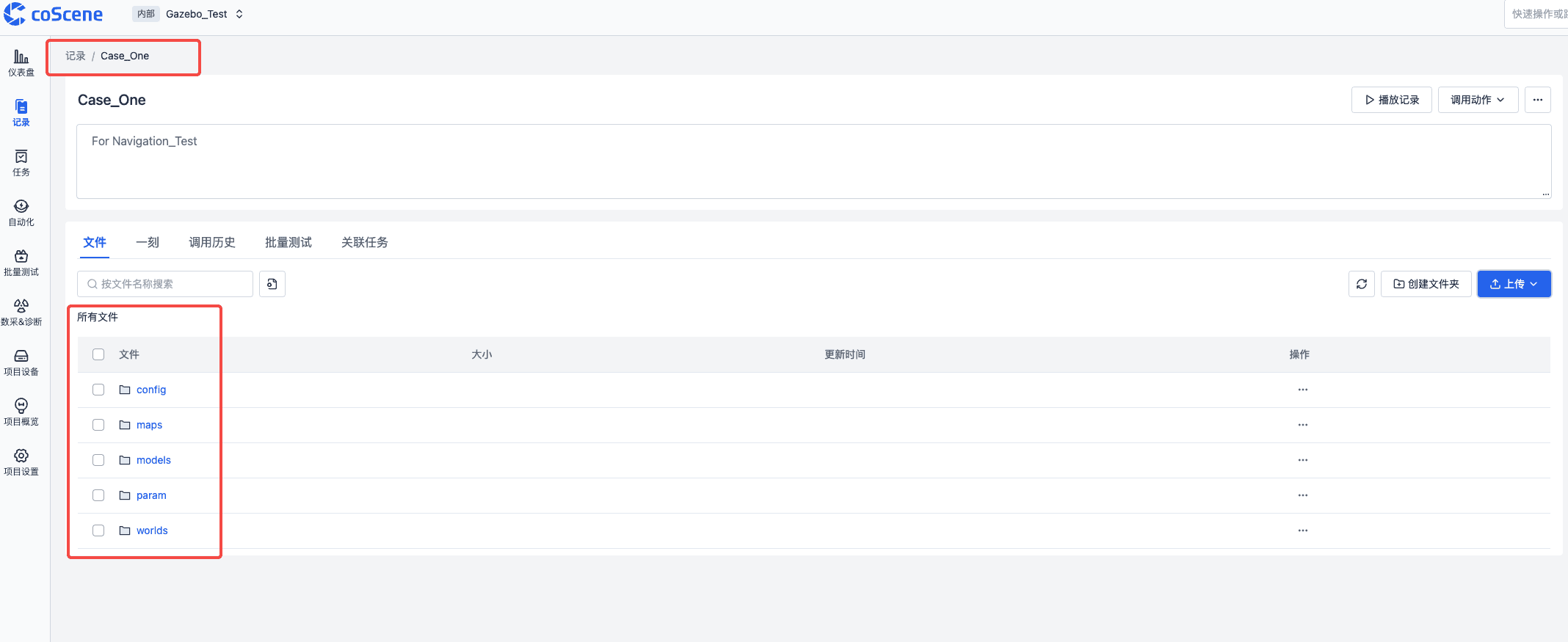
每条记录都可以包含:
地图:map.pgm + map.yaml
机器人模型:如 turtlebot3_waffle_pi
场景配置:case.yaml 等
world 文件:动态或静态仿真环境定义 以及一切,你测试程序中需要使用的依赖与配置环境。
比如下图就是一个典型测试记录包含的内容结构:
注意: 平台支持上传各种类型的文件,同时对于测试程序和被测的算法在调用文件时遵循一定的规则。
可参考我们的支持文档: coScene 帮助文档 | 关于批量测试

⚙️ 步骤 4:配置测试触发逻辑
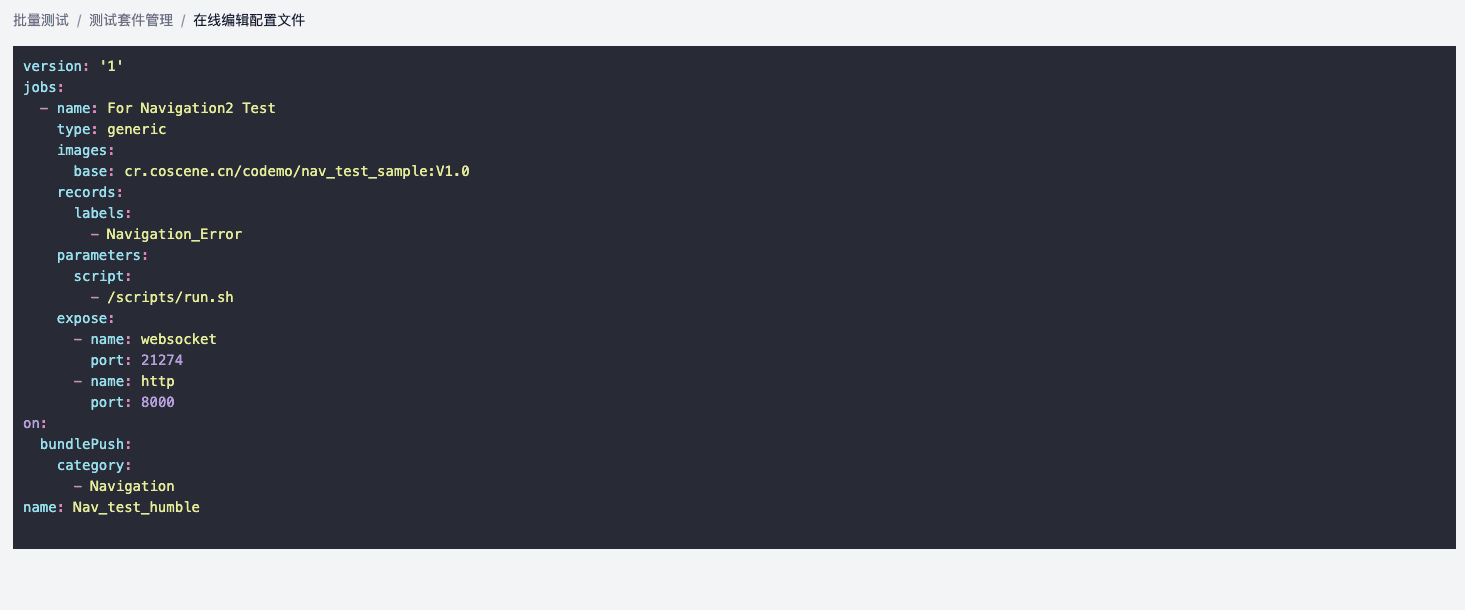
你可以为每个项目配置触发策略:
算法上传时自动触发
手动执行某几条记录
按标签、版本进行筛选执行 支持多记录批量运行、统一查看测试进度和结果,
参考如下,详细内容可参考我们的指引文档:coScene | 测试套件

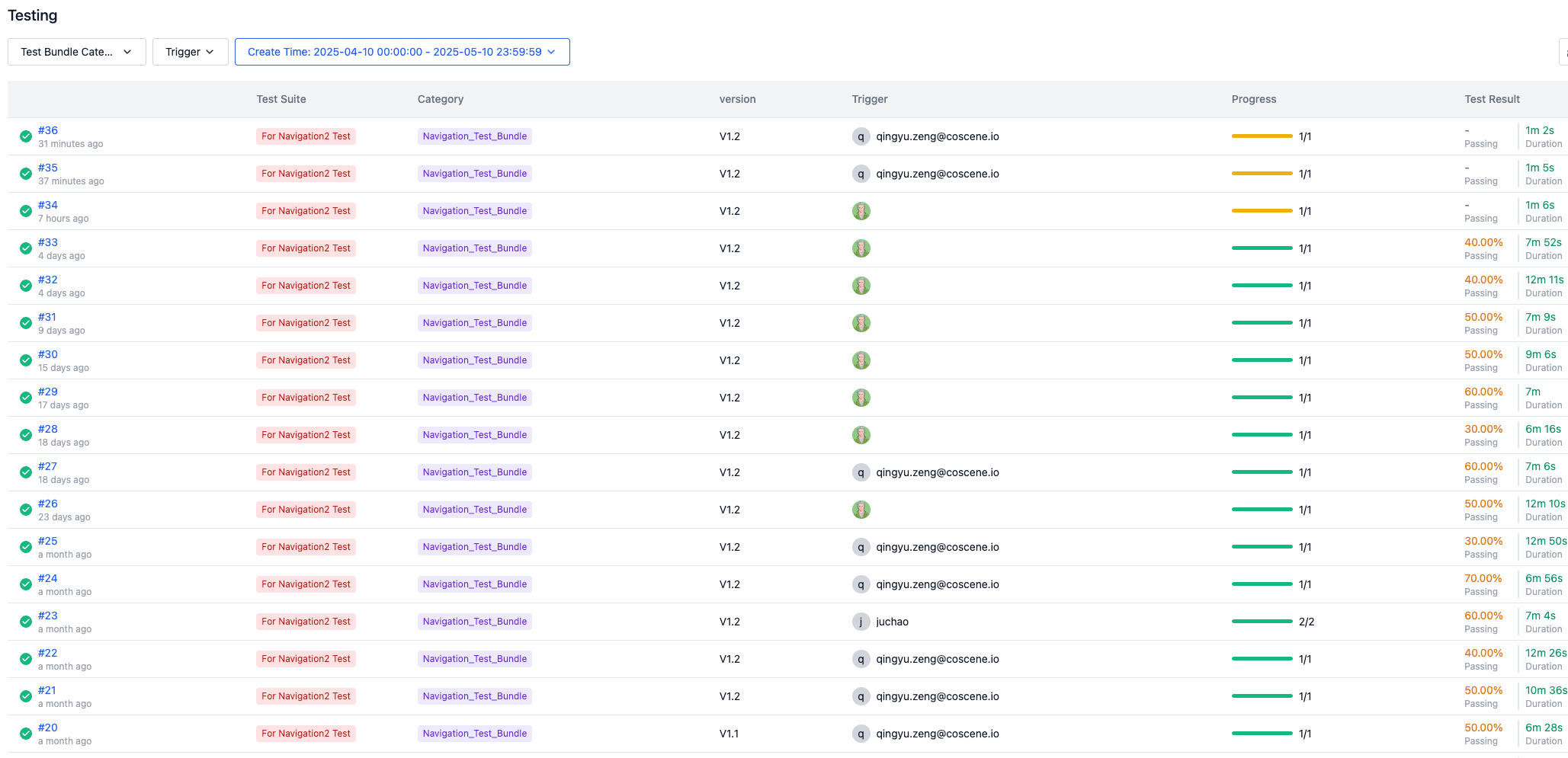
📊 步骤 5:运行测试,观测测试过程与结果

刻行时空支持在测试过程中实时观测测试运行的情况,同时也支持将测试过程录制,作为完整测试输出:

测试完成后,平台会生成可视化测试报告,包括:
机器人轨迹
成功/失败指标评分
日志输出 / 异常信息

🚀 结语
把繁琐的工具搭建过程交给刻行时空,算法人员轻装上阵搞研发。每次代码更新之后,再也不用重复搭环境、反复运行脚本、对着日志手动比对结果。一键上传算法,平台自动完成测试,全流程标准化、自动化,助你把时间花在更重要的事情上。