
客户挑战

异构机器人对接成本高昂
01
异构机器人管理之困
缺乏一个中立第三方的平台,对异构机器人进行统一的管理和数据采集
设备前期准备工作长
ROS 版本多,适配难,设备前期准备工作冗长,效率低
异构机器人对接成本高昂
01
异构机器人管理之困
缺乏一个中立第三方的平台,对异构机器人进行统一的管理和数据采集
设备前期准备工作长
ROS 版本多,适配难,设备前期准备工作冗长,效率低
数据采集和标注流程分离
02
缺少数据回流通道
机器执行完技能,数据遗留在机器人本体中,需手动拷贝数据回传
采集和标注管理流程成本高
缺乏人员权限管控,难以规范采集、标注流程
数据可复用性低
03
数据采集之杂
往往客户来一次需求需要重采一次,数据难以有效沉淀和复用
异构机器人对接成本高昂
01
异构机器人管理之困
缺乏一个中立第三方的平台,对异构机器人进行统一的管理和数据采集
设备前期准备工作长
ROS 版本多,适配难,设备前期准备工作冗长,效率低
异构机器人对接成本高昂
01
异构机器人管理之困
缺乏一个中立第三方的平台,对异构机器人进行统一的管理和数据采集
设备前期准备工作长
ROS 版本多,适配难,设备前期准备工作冗长,效率低
数据采集和标注流程分离
02
缺少数据回流通道
机器执行完技能,数据遗留在机器人本体中,需手动拷贝数据回传
采集和标注管理流程成本高
缺乏人员权限管控,难以规范采集、标注流程
数据可复用性低
03
数据采集之杂
往往客户来一次需求需要重采一次,数据难以有效沉淀和复用
异构机器人对接成本高昂
01
异构机器人管理之困
缺乏一个中立第三方的平台,对异构机器人进行统一的管理和数据采集
设备前期准备工作长
ROS 版本多,适配难,设备前期准备工作冗长,效率低
异构机器人对接成本高昂
01
异构机器人管理之困
缺乏一个中立第三方的平台,对异构机器人进行统一的管理和数据采集
设备前期准备工作长
ROS 版本多,适配难,设备前期准备工作冗长,效率低
数据采集和标注流程分离
02
缺少数据回流通道
机器执行完技能,数据遗留在机器人本体中,需手动拷贝数据回传
采集和标注管理流程成本高
缺乏人员权限管控,难以规范采集、标注流程
数据可复用性低
03
数据采集之杂
往往客户来一次需求需要重采一次,数据难以有效沉淀和复用
异构机器人对接成本高昂
01
异构机器人管理之困
缺乏一个中立第三方的平台,对异构机器人进行统一的管理和数据采集
设备前期准备工作长
ROS 版本多,适配难,设备前期准备工作冗长,效率低
异构机器人对接成本高昂
01
异构机器人管理之困
缺乏一个中立第三方的平台,对异构机器人进行统一的管理和数据采集
设备前期准备工作长
ROS 版本多,适配难,设备前期准备工作冗长,效率低
数据采集和标注流程分离
02
缺少数据回流通道
机器执行完技能,数据遗留在机器人本体中,需手动拷贝数据回传
采集和标注管理流程成本高
缺乏人员权限管控,难以规范采集、标注流程
数据可复用性低
03
数据采集之杂
往往客户来一次需求需要重采一次,数据难以有效沉淀和复用
具身智能数据采集厂
数据自动回流
开源的端侧软件
适配多种版本的 ROS,可快速对接异构机器人
命令行工具
数据上传和下载的命令行工具(coCLI),可实现数据的断点续传
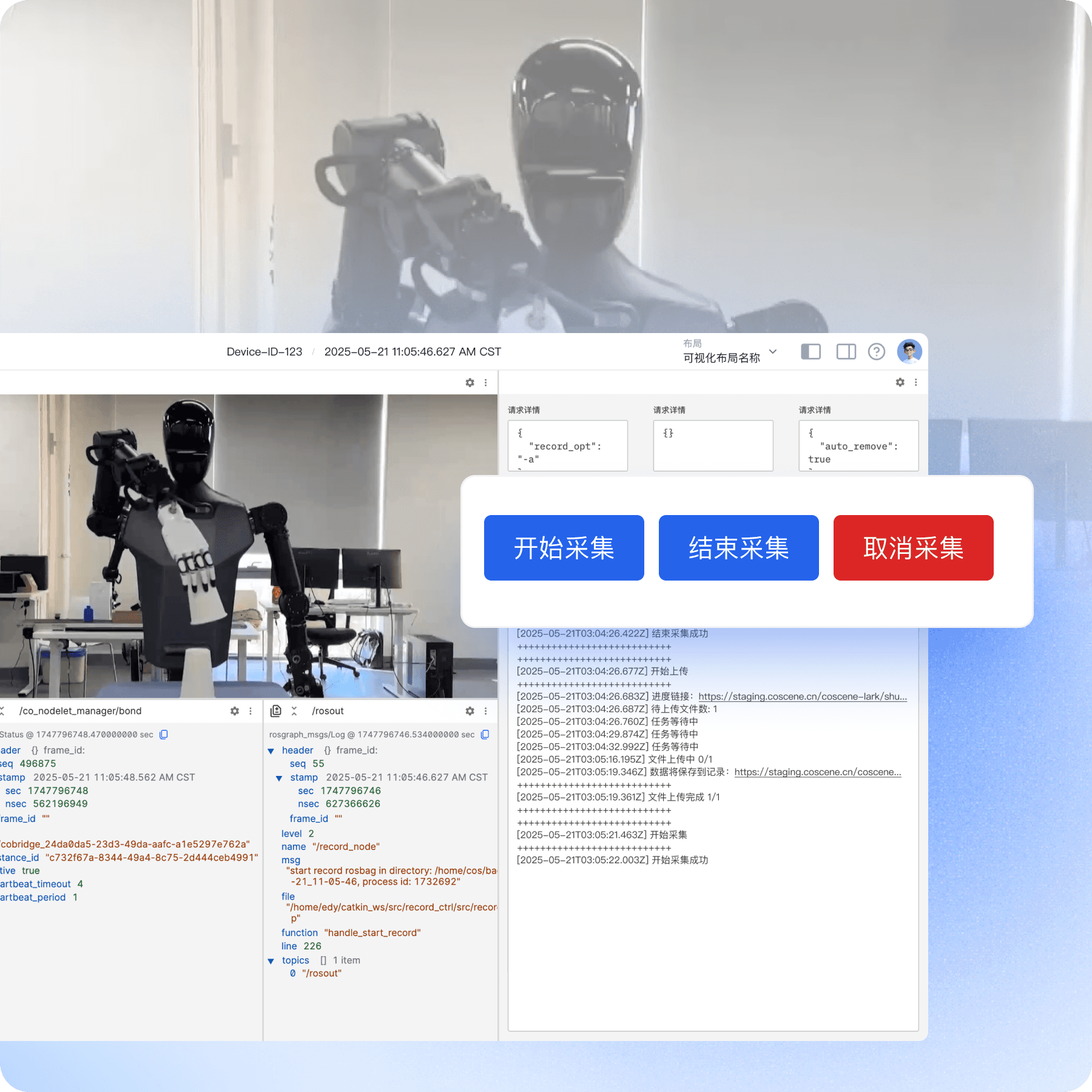
实时可视化模式采集
实时可视化页面一键采集,数据自动上传,提升数据采集效率

任务管理和自动化
一站式任务管理
实现数据采集、数据标注和数据审核的高效流转
自动化创建任务
采集任务和标注任务可自动创建,提升管理效率
可控的角色与权限
企业可以自定义多种角色和权限,可实现便捷管理
数据清洗和甄选
4D 可视化能力
一站式 4D 可视化能力,可查看摄像头,雷达点云,触觉,关节,力控等多种数据
MCAP & HDF5 数据转化
内置数据转化动作可实现机器数据格式转换,如 MCAP 和 HDF5 的数据转换

强悍的基础设施
支持弹性扩缩容
支持弹性扩缩容,存储和算力按需调用
千万台机器同时操作
支持千台万台机器人同时采集和数据上传
大规模数据管理与调度
支持 EB 级别数据管理和调度能力
客户挑战
客户挑战
异构机器人对接成本高昂
数据采集和标注流程分离
数据可复用性低
异构机器人对接成本高昂
异构机器人管理之困
缺乏一个中立第三方的平台,对异构机器人进行统一的管理和数据采集
设备前期准备工作长
ROS 版本多,适配难,设备前期准备工作冗长,效率低
01
异构机器人对接成本高昂
数据采集和标注流程分离
数据可复用性低
异构机器人对接成本高昂
异构机器人管理之困
缺乏一个中立第三方的平台,对异构机器人进行统一的管理和数据采集
设备前期准备工作长
ROS 版本多,适配难,设备前期准备工作冗长,效率低
01
具身智能数据采集厂
数据自动回流
开源的端侧软件
适配多种版本的 ROS,可快速对接异构机器人
命令行工具
数据上传和下载的命令行工具(coCLI),可实现数据的断点续传
实时可视化模式采集
实时可视化页面一键采集,数据自动上传,提升数据采集效率
任务管理和自动化
一站式任务管理
实现数据采集、数据标注和数据审核的高效流转
自动化创建任务
采集任务和标注任务可自动创建,提升管理效率
可控的角色与权限
企业可以自定义多种角色和权限,可实现便捷管理
数据清洗和甄选
多模态数据可视化能力
一站式 4D 可视化能力,可查看摄像头,雷达点云,触觉,关节,力控等多种数据
MCAP & HDF5 数据转化
内置多种数据转化动作可实现机器数据格式转换,如 MCAP 和 HDF5 的数据转换
强悍的基础设施
支持弹性扩缩容
支持弹性扩缩容,存储和算力按需调用
千万台机器同时操作
支持千台万台机器人同时采集和数据上传
大规模数据管理与调度
支持 EB 级别数据管理和调度能力
客户收益
客户收益
轻松对接异构机器
中立的第三方时空数据平台,轻松对接多种构型的机器人
轻松对接异构机器
中立的第三方时空数据平台,轻松对接多种构型的机器人
数据自动采集
无需额外操作,数据采集和上传自动化完成
数据自动采集
无需额外操作,数据采集和上传自动化完成
千万台机器的支持
轻松支持百千台的机器人的采集工作,可管理 PB 甚至 EB 级别数据
千万台机器的支持
轻松支持百千台的机器人的采集工作,可管理 PB 甚至 EB 级别数据
数据一直在线
无需担心数据损坏
数据一直在线
无需担心数据损坏
数据复用率高
存储采用 MCAP 格式,可记录机器人全部传感器的数据,按客户对于数据的需求运行自动化,生成客户所需数据
数据复用率高
存储采用 MCAP 格式,可记录机器人全部传感器的数据,按客户对于数据的需求运行自动化,生成客户所需数据
轻松对接异构机器
中立的第三方时空数据平台,轻松对接多种构型的机器人
轻松对接异构机器
中立的第三方时空数据平台,轻松对接多种构型的机器人
数据自动采集
无需额外操作,数据采集和上传自动化完成
数据自动采集
无需额外操作,数据采集和上传自动化完成
千万台机器的支持
轻松支持百千台的机器人的采集工作,可管理 PB 甚至 EB 级别数据
千万台机器的支持
轻松支持百千台的机器人的采集工作,可管理 PB 甚至 EB 级别数据
数据一直在线
无需担心数据损坏
数据一直在线
无需担心数据损坏
数据复用率高
存储采用 MCAP 格式,可记录机器人全部传感器的数据,按客户对于数据的需求运行自动化,生成客户所需数据
数据复用率高
存储采用 MCAP 格式,可记录机器人全部传感器的数据,按客户对于数据的需求运行自动化,生成客户所需数据
数据自动采集
无需额外操作,数据采集和上传自动化完成
千万台机器的支持
轻松支持百千台的机器人的采集工作,可管理 PB 甚至 EB 级别数据
数据一直在线
无需担心数据损坏
数据复用率高
存储采用 MCAP 格式,可记录机器人全部传感器的数据,按客户对于数据的需求运行自动化,生成客户所需数据
解锁数据潜能,打造数据飞轮


解锁数据潜能
打造数据飞轮
解锁数据潜能,打造数据飞轮
具身智能数据采集厂
数据自动回流
开源的端侧软件
适配多种版本的 ROS,可快速对接异构机器人
命令行工具
数据上传和下载的命令行工具(coCLI),可实现数据的断点续传
实时可视化模式采集
实时可视化页面一键采集,数据自动上传,提升数据采集效率
任务管理和自动化
一站式任务管理
实现数据采集、数据标注和数据审核的高效流转
自动化创建任务
采集任务和标注任务可自动创建,提升管理效率
可控的角色与权限
企业可以自定义多种角色和权限,可实现便捷管理
数据清洗和甄选
4D 可视化能力
一站式 4D 可视化能力,可查看摄像头,雷达点云,触觉,关节,力控等多种数据
MCAP & HDF5 数据转化
内置数据转化动作可实现机器数据格式转换,如 MCAP 和 HDF5 的数据转换
强悍的基础设施
支持弹性扩缩容
支持弹性扩缩容,存储和算力按需调用
千万台机器同时操作
支持千台万台机器人同时采集和数据上传
大规模数据管理与调度
支持 EB 级别数据管理和调度能力